Available for

The following tutorials will help you to familiarize with FlexBE and learn to effectively use it. Since FlexBE is very versatile and offers a lot of options depending on what you want to realize, it is not required to complete all of the tutorials before starting to work productively. After you have a general understanding of how things work (the first block of the tutorials), feel free to just use and explore FlexBE on your own. Come back here to learn more about certain details whenever required.
Missing advanced tutorials will be completed soon. Please simply contact me for support until then.
Basic Tutorials (recommended, ordered)
Advanced Tutorials (choose as required, independent)
The behavior engine itself consists of the following ROS packages:
Furthermore, the following ROS packages are recommended or expected to reside in the high-level control repository for your project:
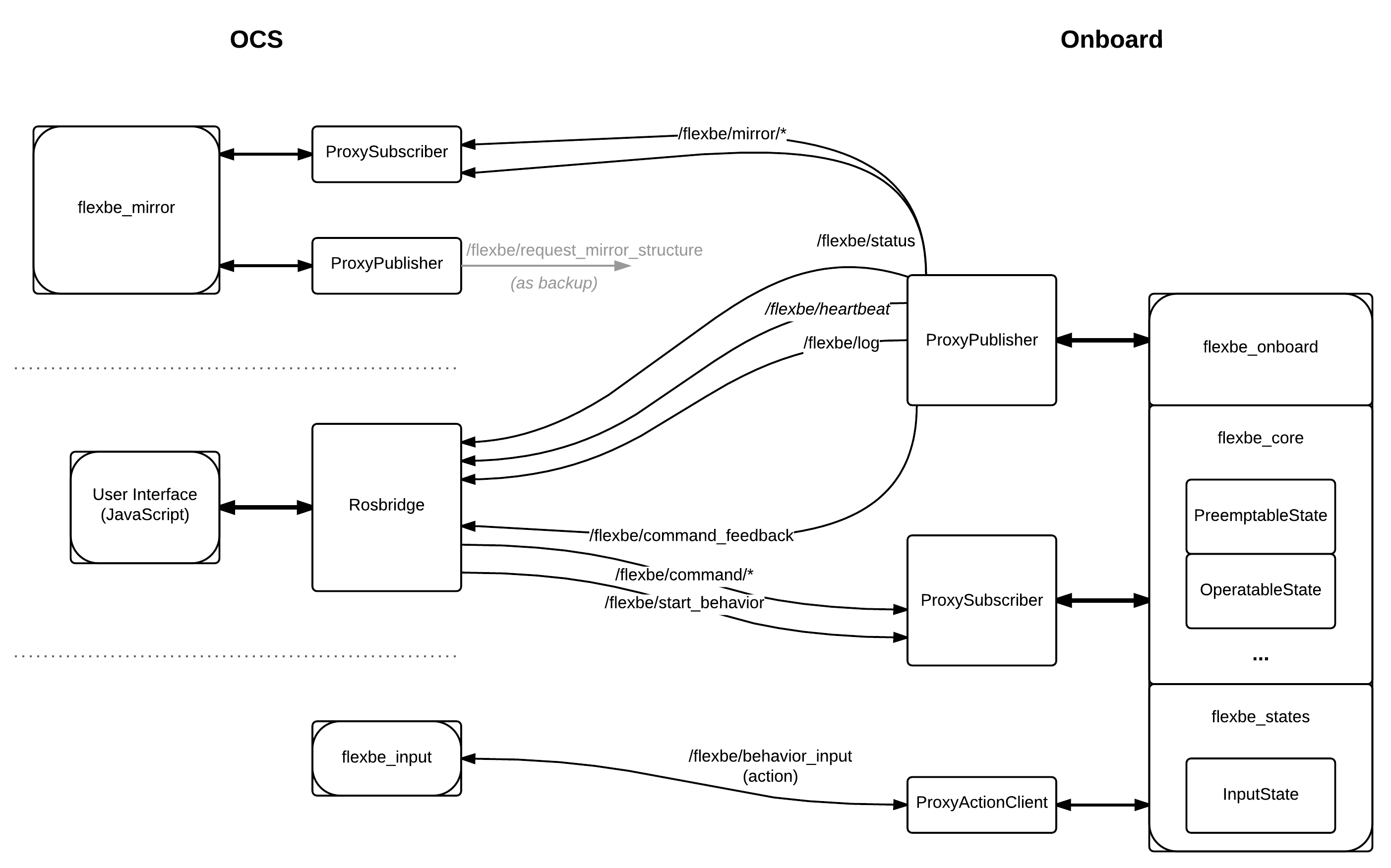
The following figure gives an overview of all ROS topics involved in communicating between the onboard behavior executive and the ROS nodes running at the operator control station (OCS).
All behaviors record their execution in log files located in a "~/logs/" folder on the robot. These textfiles have a structure which can be evaluated by an online tool for FlexBE Logs. This tool currently is in a prototype stage and will be linked here as soon as it approved for public release. For now, in addition to the online tool for evaluation, a simple evaluation script is available for generating tables based on the respective log file:
rosrun flexbe_widget evaluate_logs
|
Github Repositories flexbe_behavior_engine vigir_behaviors |
Philipp Schillinger Contact GitHub |